面向能效和低延迟的语音控制智能家居:离线语音识别与物联网集成方案——论文阅读
本文提出了一种面向能效和低延迟的智能家居语音控制方案,通过离线语音识别和物联网集成解决当前云端架构的缺陷。研究分析了现有系统的能耗模型,指出云端处理导致的高延迟(100-500ms)和能源浪费(一次简单命令消耗815W·s)。基于深度可分离卷积神经网络(DS-CNN)和8位量化技术,开发了计算量减少88.5%的轻量级关键词识别算法。系统采用四层架构设计,通过分层抽象和本地处理实现能效提升98%。实
面向能效和低延迟的语音控制智能家居:离线语音识别与物联网集成方案
Huang P, Ullah I, Wei X, et al. Towards Energy-Efficient and Low-Latency Voice-Controlled Smart Homes: A Proposal for Offline Speech Recognition and IoT Integration[J]. arXiv preprint arXiv:2506.07494, 2025.
1. 引言与研究背景
智能家居系统的发展正在深刻改变人们的生活方式。通过集成人工智能语音识别和物联网技术,用户可以通过语音命令控制家中的任何设备。然而,当前主流的云端语音识别服务存在着根本性的架构缺陷。本研究提出了一种基于离线语音识别和去中心化物联网网络的创新解决方案,旨在实现真正的低延迟、高能效语音控制。
1.1 现有系统的技术架构分析
当前的智能家居语音控制系统主要依赖于云端处理模式。以Amazon Alexa为例,整个系统的工作流程可以表示为:
Ptotal=Pdevice+Pnetwork+Pcloud+PtransmissionP_{total} = P_{device} + P_{network} + P_{cloud} + P_{transmission}Ptotal=Pdevice+Pnetwork+Pcloud+Ptransmission
其中PtotalP_{total}Ptotal表示总功耗,PdeviceP_{device}Pdevice为终端设备功耗,PnetworkP_{network}Pnetwork为网络设备功耗,PcloudP_{cloud}Pcloud为云端服务器功耗,PtransmissionP_{transmission}Ptransmission为数据传输功耗。
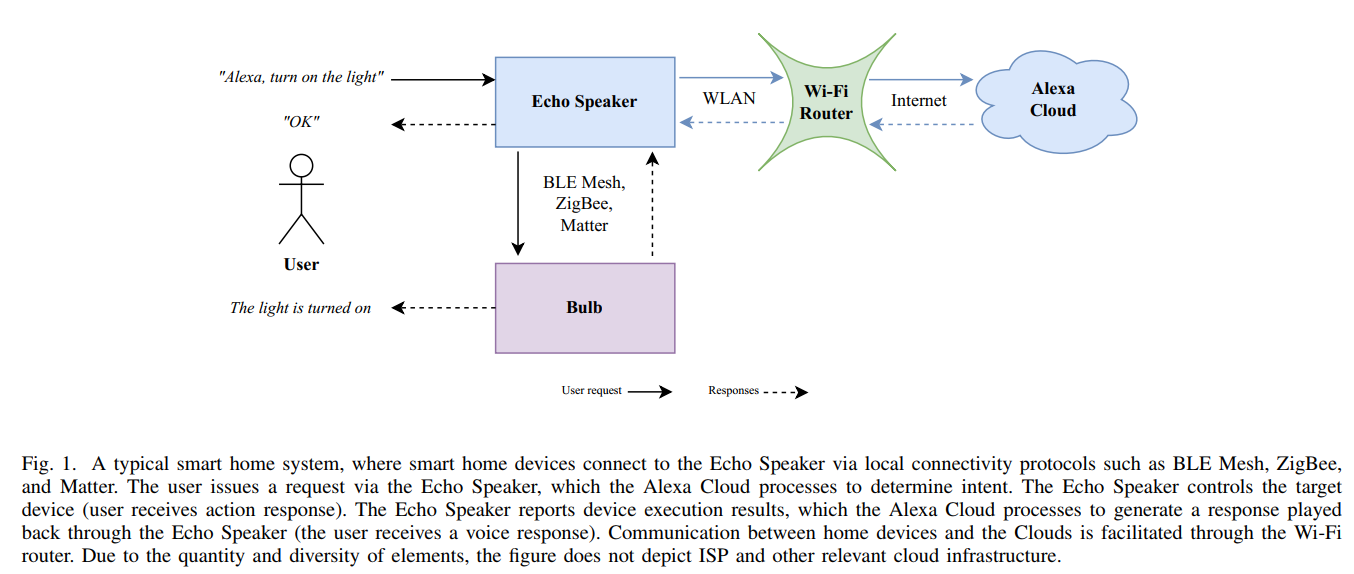
图1展示了典型的智能家居系统架构:在这个系统中,智能家居设备(如智能灯泡)通过本地连接协议(BLE Mesh、ZigBee或Matter)连接到Echo智能音箱。当用户说出"Alexa, turn on the light"时,Echo音箱作为网关设备,通过家庭Wi-Fi路由器将语音数据上传到Alexa云端。云端处理后返回控制指令,Echo音箱再通过本地协议控制灯泡。整个过程涉及多次网络往返,用户最终收到"OK"的语音反馈确认。
这种架构的延迟可以建模为:
Ttotal=Tcapture+Tupload+Tprocess+Tdownload+Texecute+TfeedbackT_{total} = T_{capture} + T_{upload} + T_{process} + T_{download} + T_{execute} + T_{feedback}Ttotal=Tcapture+Tupload+Tprocess+Tdownload+Texecute+Tfeedback
其中各项分别代表音频捕获、上传、云端处理、下载、执行和反馈的时间。在典型的网络条件下,Tupload+TdownloadT_{upload} + T_{download}Tupload+Tdownload就可能达到100-500ms,严重影响用户体验。
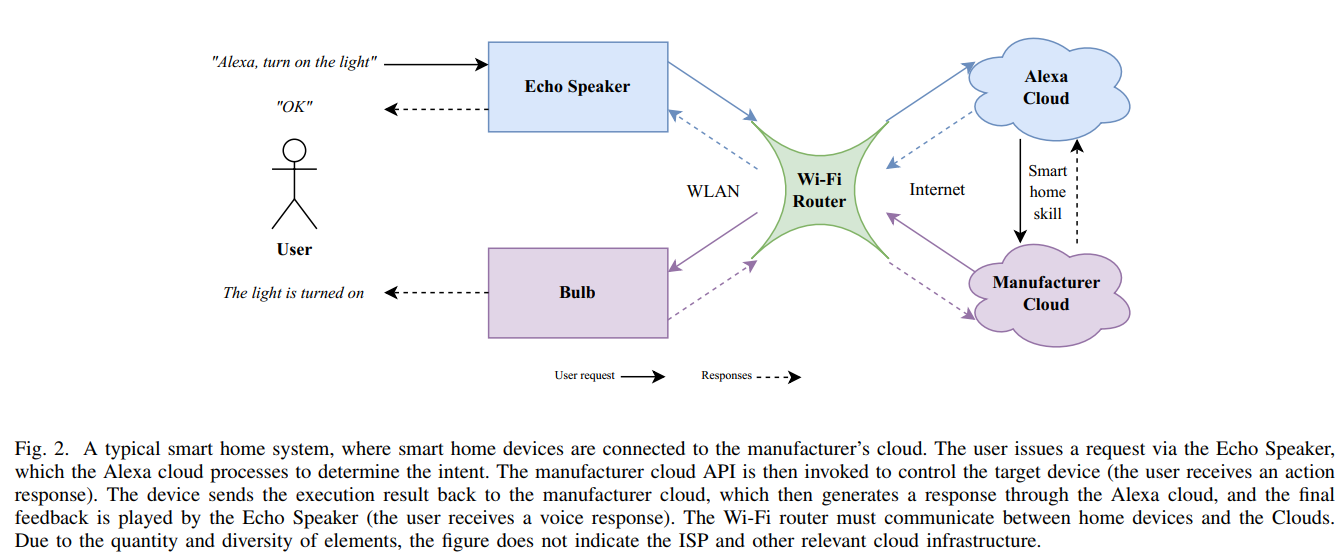
图2描述了更复杂的制造商云端集成场景:在这种架构中,智能家居设备直接连接到各自制造商的云平台。当用户通过Echo音箱发出语音命令时,Alexa云端需要通过智能家居技能(Smart Home Skills)调用制造商云端的API。这种双云架构进一步增加了系统复杂性,延迟计算变为:
Tdual−cloud=Ttotal+TAPI+TmanufacturerT_{dual-cloud} = T_{total} + T_{API} + T_{manufacturer}Tdual−cloud=Ttotal+TAPI+Tmanufacturer
其中TAPIT_{API}TAPI是API调用延迟,TmanufacturerT_{manufacturer}Tmanufacturer是制造商云端处理时间。
1.2 能源消耗的定量分析
根据网络设备的典型功耗数据,我们可以估算一次简单的"开灯"命令的能源消耗。假设:
- Echo音箱功耗:3W
- 家庭路由器功耗:10W
- ISP网络设备(平均分摊):50W
- 云端服务器(平均分摊):100W
对于一次持续5秒的语音交互,总能耗为:
KaTeX parse error: Undefined control sequence: \cdotp at position 1: \̲c̲d̲o̲t̲p̲
相比之下,如果使用离线处理,能耗仅为:
KaTeX parse error: Undefined control sequence: \cdotp at position 1: \̲c̲d̲o̲t̲p̲
能效提升比率达到:
η=Etotal−EofflineEtotal=815−15.5815≈98%\eta = \frac{E_{total} - E_{offline}}{E_{total}} = \frac{815 - 15.5}{815} \approx 98\%η=EtotalEtotal−Eoffline=815815−15.5≈98%
2. 关键词识别技术的理论基础
2.1 KWS算法的数学模型
关键词识别本质上是一个音频信号分类问题。给定音频信号x(t)x(t)x(t),KWS系统需要判断其是否包含预定义的关键词集合W={w1,w2,...,wn}\mathcal{W} = \{w_1, w_2, ..., w_n\}W={w1,w2,...,wn}中的某个词。
首先,音频信号经过短时傅里叶变换(STFT)转换为频谱图:
X(m,k)=∑n=0N−1x(n+mH)⋅w(n)⋅e−j2πkn/NX(m, k) = \sum_{n=0}^{N-1} x(n + mH) \cdot w(n) \cdot e^{-j2\pi kn/N}X(m,k)=n=0∑N−1x(n+mH)⋅w(n)⋅e−j2πkn/N
其中mmm是帧索引,kkk是频率索引,HHH是帧移,w(n)w(n)w(n)是窗函数,NNN是FFT点数。
接下来计算梅尔频率倒谱系数(MFCC):
MFCC(m,i)=∑j=1Jlog(Ej(m))cos[i(j−0.5)πJ]\text{MFCC}(m, i) = \sum_{j=1}^{J} \log(E_j(m)) \cos\left[\frac{i(j-0.5)\pi}{J}\right]MFCC(m,i)=j=1∑Jlog(Ej(m))cos[Ji(j−0.5)π]
其中Ej(m)E_j(m)Ej(m)是第mmm帧在第jjj个梅尔滤波器组的能量输出。
2.2 神经网络模型优化
论文中提到的DS-CNN(深度可分离卷积神经网络)通过分解标准卷积操作来减少计算复杂度。标准卷积的计算量为:
Opsstandard=DK×DK×M×N×DF×DF\text{Ops}_{standard} = D_K \times D_K \times M \times N \times D_F \times D_FOpsstandard=DK×DK×M×N×DF×DF
其中DKD_KDK是卷积核大小,MMM是输入通道数,NNN是输出通道数,DFD_FDF是特征图大小。
深度可分离卷积将其分解为深度卷积和逐点卷积:
Opsdepthwise=DK×DK×M×DF×DF\text{Ops}_{depthwise} = D_K \times D_K \times M \times D_F \times D_FOpsdepthwise=DK×DK×M×DF×DF
Opspointwise=M×N×DF×DF\text{Ops}_{pointwise} = M \times N \times D_F \times D_FOpspointwise=M×N×DF×DF
总计算量为:
OpsDS−CNN=Opsdepthwise+Opspointwise\text{Ops}_{DS-CNN} = \text{Ops}_{depthwise} + \text{Ops}_{pointwise}OpsDS−CNN=Opsdepthwise+Opspointwise
计算量减少比率为:
ρ=OpsDS−CNNOpsstandard=1N+1DK2\rho = \frac{\text{Ops}_{DS-CNN}}{\text{Ops}_{standard}} = \frac{1}{N} + \frac{1}{D_K^2}ρ=OpsstandardOpsDS−CNN=N1+DK21
当N=256N=256N=256,DK=3D_K=3DK=3时,ρ≈0.115\rho \approx 0.115ρ≈0.115,即计算量减少约88.5%。
2.3 模型量化技术
为了在MCU上部署,需要将32位浮点模型量化为8位定点表示。量化过程可以表示为:
q=round(x−xminxmax−xmin×(2b−1))q = \text{round}\left(\frac{x - x_{min}}{x_{max} - x_{min}} \times (2^b - 1)\right)q=round(xmax−xminx−xmin×(2b−1))
其中xxx是原始浮点值,b=8b=8b=8是量化位数。反量化过程为:
x^=q2b−1×(xmax−xmin)+xmin\hat{x} = \frac{q}{2^b - 1} \times (x_{max} - x_{min}) + x_{min}x^=2b−1q×(xmax−xmin)+xmin
量化误差的期望值为:
E[ϵ]=E[x^−x]=(xmax−xmin)2b+1E[\epsilon] = E[\hat{x} - x] = \frac{(x_{max} - x_{min})}{2^{b+1}}E[ϵ]=E[x^−x]=2b+1(xmax−xmin)
3. 系统架构设计
3.1 四层架构模型
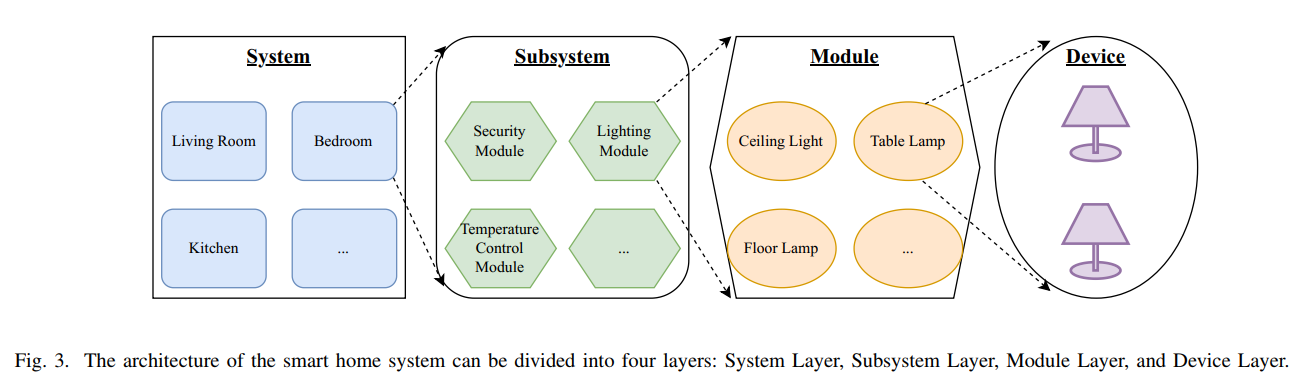
图3展示的四层架构设计采用了分层抽象的思想。系统层(System Layer)管理整个家庭空间,包含多个子系统如客厅、卧室、厨房等。子系统层(Subsystem Layer)对应具体的物理空间,每个子系统包含多个功能模块。模块层(Module Layer)实现特定功能,如照明模块包含吊灯、台灯、落地灯等设备。设备层(Device Layer)是具体的硬件实现。
这种架构的消息路由可以用图论表示。设G=(V,E)G=(V,E)G=(V,E)为系统网络图,其中VVV是设备节点集合,EEE是连接边集合。从设备viv_ivi到设备vjv_jvj的最短路径可以通过Dijkstra算法计算:
d(vi,vj)=minp∈Pij∑e∈pw(e)d(v_i, v_j) = \min_{p \in P_{ij}} \sum_{e \in p} w(e)d(vi,vj)=p∈Pijmine∈p∑w(e)
其中PijP_{ij}Pij是所有可能路径的集合,w(e)w(e)w(e)是边的权重(如延迟或跳数)。
3.2 组件架构分析
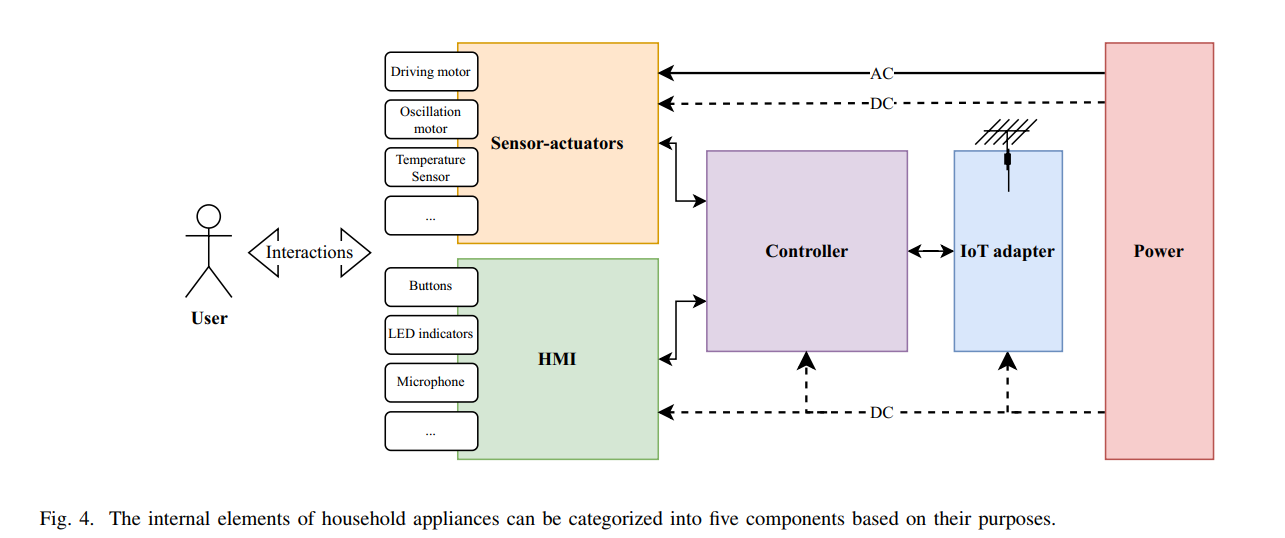
图4详细展示了家用电器的内部组件架构。电源组件提供必要的电压和电流,包括用于驱动执行器的AC/DC电源和用于控制器的低压DC电源。传感器-执行器组件实现设备的核心功能,如电机驱动和温度传感。控制器(通常是MCU)协调各组件的功能。人机交互(HMI)单元包括按钮输入和LED指示输出。物联网适配器提供网络连接能力。
功率分配可以建模为:
Ptotal=Pactuator+Pcontroller+PHMI+PIoT+PKWSP_{total} = P_{actuator} + P_{controller} + P_{HMI} + P_{IoT} + P_{KWS}Ptotal=Pactuator+Pcontroller+PHMI+PIoT+PKWS
其中新增的PKWSP_{KWS}PKWS项表示语音识别单元的功耗,典型值为2-10mW。
4. KWS单元集成方案详解
4.1 共存集成方法的实现
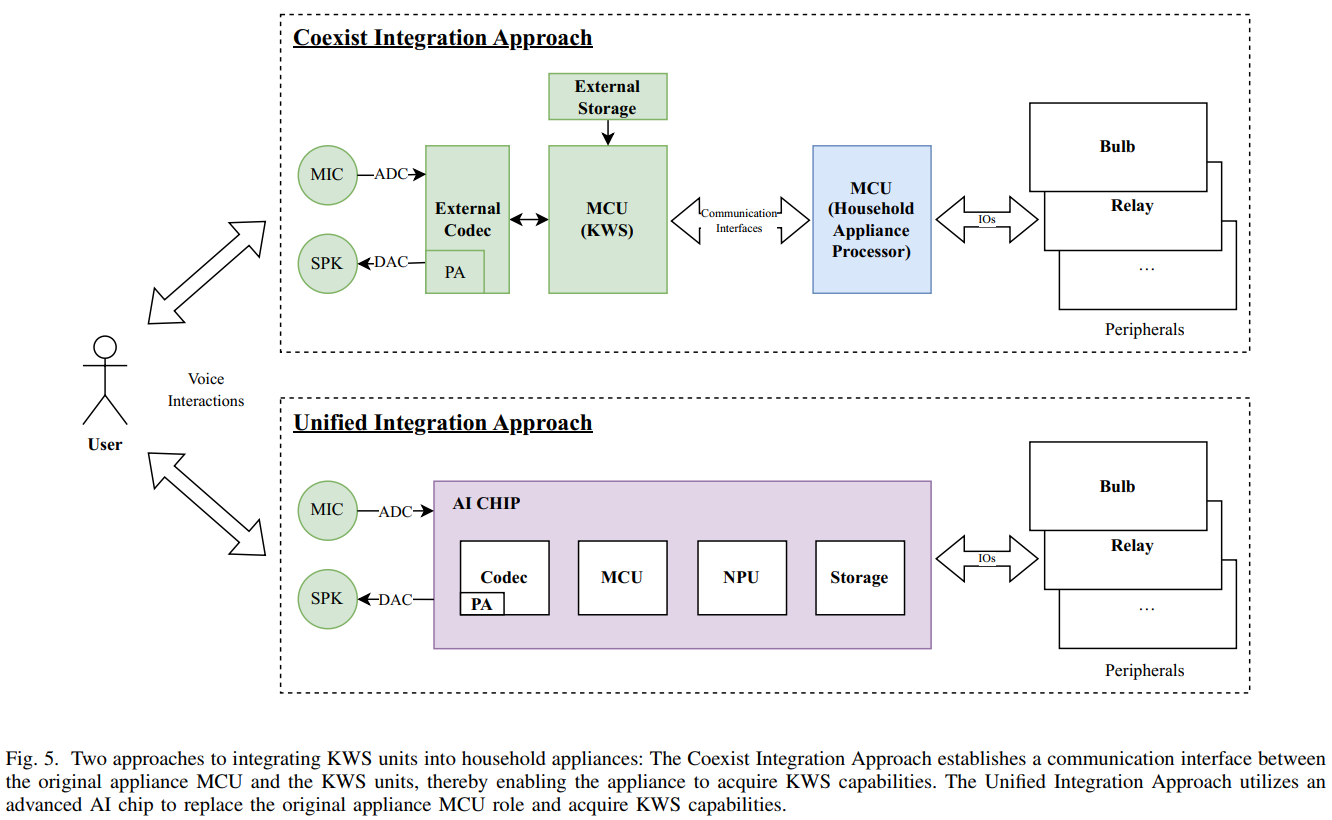
图5上部展示的共存集成方法保留了原有的家电MCU,通过通信接口与独立的KWS MCU连接。音频信号处理流程为:
MIC→ADCDigital Audio→I2SKWS MCU→UART/SPIAppliance MCU\text{MIC} \xrightarrow{ADC} \text{Digital Audio} \xrightarrow{I2S} \text{KWS MCU} \xrightarrow{UART/SPI} \text{Appliance MCU}MICADCDigital AudioI2SKWS MCUUART/SPIAppliance MCU
KWS MCU的处理算法可以表示为:
Algorithm 1: Coexist Integration Approach
1: while true do
2: audio_buffer ← capture_audio()
3: features ← extract_MFCC(audio_buffer)
4: probability ← neural_network(features)
5: if probability > threshold then
6: keyword ← argmax(probability)
7: send_to_appliance_MCU(keyword)
8: end if
9: end while
通信协议的数据包格式为:
Packet=[Header∣Command∣Parameters∣CRC]\text{Packet} = [\text{Header} | \text{Command} | \text{Parameters} | \text{CRC}]Packet=[Header∣Command∣Parameters∣CRC]
其中Header包含包类型和长度,Command是识别到的关键词ID,Parameters是可选参数,CRC用于错误检测。
4.2 统一集成方法的优化
图5下部展示的统一集成方法使用专用AI芯片替代原有MCU。以Voitist 811为例,其内部集成了:
- NPU:专用神经网络加速器,支持INT8运算
- Codec:集成ADC/DAC,采样率可达48kHz
- MCU:ARM Cortex-M4核心,主频80MHz
- Storage:512KB Flash + 128KB SRAM
NPU的并行计算能力可以表示为:
TOPS=fclock×NMAC×21012\text{TOPS} = \frac{f_{clock} \times N_{MAC} \times 2}{10^{12}}TOPS=1012fclock×NMAC×2
其中fclockf_{clock}fclock是时钟频率,NMACN_{MAC}NMAC是MAC单元数量。对于典型配置,可达到0.1 TOPS的算力。
5. 网络协议与拓扑设计
5.1 Mesh网络的数学模型
Mesh网络的可靠性可以用网络连通概率表示。假设每条链路的可靠性为ppp,对于具有kkk条不相交路径的网络,端到端可靠性为:
R=1−(1−ph1)(1−ph2)...(1−phk)R = 1 - (1 - p^{h_1})(1 - p^{h_2})...(1 - p^{h_k})R=1−(1−ph1)(1−ph2)...(1−phk)
其中hih_ihi是第iii条路径的跳数。
对于洪泛机制(如BLE Mesh),消息传播的时间复杂度为:
Tflood=O(D×thop)T_{flood} = O(D \times t_{hop})Tflood=O(D×thop)
其中DDD是网络直径,thopt_{hop}thop是单跳传输时间。
5.2 CoAP协议的性能分析
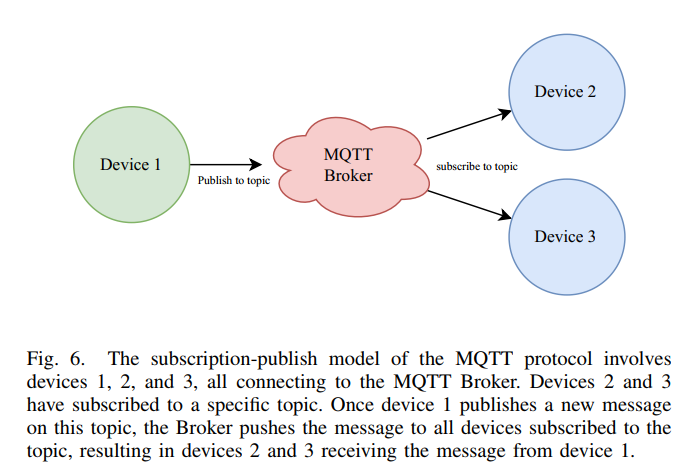
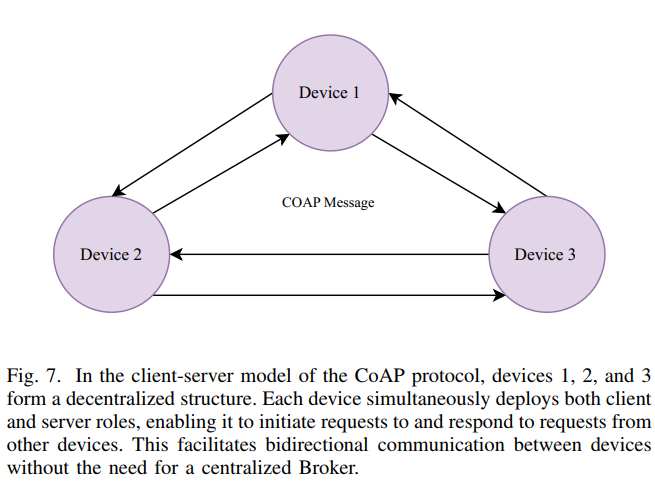
图6和图7对比了MQTT和CoAP的架构差异。MQTT采用发布-订阅模式,需要中央Broker,而CoAP支持点对点通信。
CoAP基于UDP,其报文开销为:
OverheadCoAP=4+Options+Token\text{Overhead}_{CoAP} = 4 + \text{Options} + \text{Token}OverheadCoAP=4+Options+Token
相比MQTT的TCP开销:
OverheadMQTT=20+2+Variable Header\text{Overhead}_{MQTT} = 20 + 2 + \text{Variable Header}OverheadMQTT=20+2+Variable Header
在典型配置下,CoAP的报文开销比MQTT减少约40%。
6. 语音交互模式的实现
6.1 直接设备交互
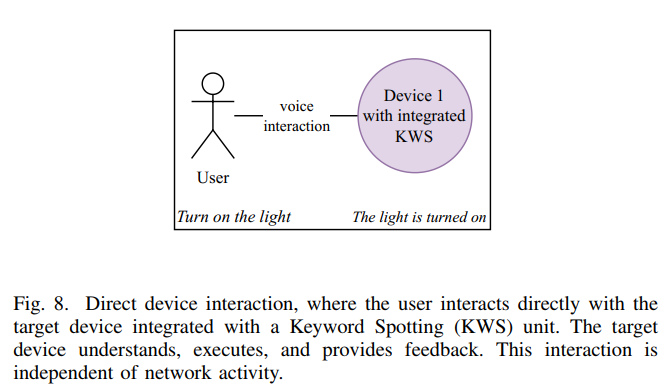
图8展示的直接设备交互模式中,语音处理完全在本地完成。延迟仅包含:
Tdirect=Tcapture+Tprocess+TexecuteT_{direct} = T_{capture} + T_{process} + T_{execute}Tdirect=Tcapture+Tprocess+Texecute
典型值为200-500ms,远低于云端处理的1-3秒。
6.2 子系统内跨设备交互
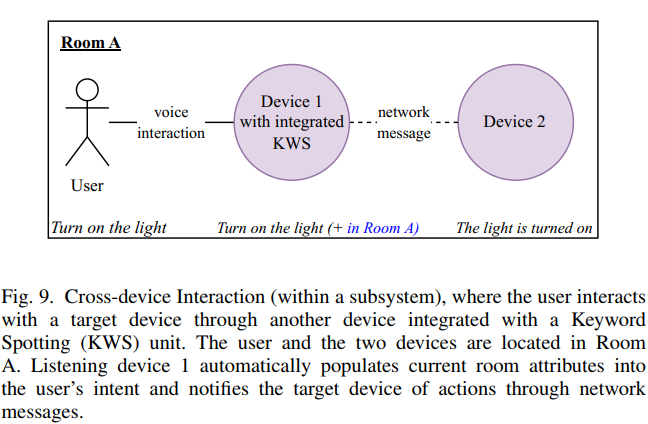
图9展示了同一房间内的跨设备交互。监听设备自动填充位置属性,消息格式为:
Message={action:"turn_on",target:"light",location:current_room}\text{Message} = \{\text{action}: \text{"turn\_on"}, \text{target}: \text{"light"}, \text{location}: \text{current\_room}\}Message={action:"turn_on",target:"light",location:current_room}
6.3 子系统间跨设备交互
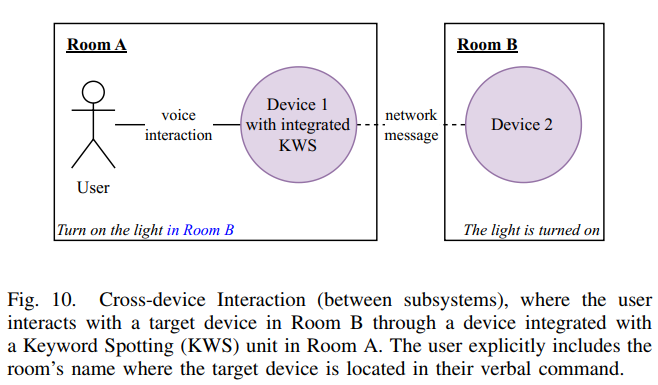
图10展示了跨房间的设备交互。用户需要明确指定目标位置:
Command=Action+Target+Location\text{Command} = \text{Action} + \text{Target} + \text{Location}Command=Action+Target+Location
例如:“Turn on the light in Room B”。
7. 性能评估与对比
7.1 延迟性能对比
系统延迟的概率分布可以建模为:
P(T<t)=1−e−λtP(T < t) = 1 - e^{-\lambda t}P(T<t)=1−e−λt
其中λ\lambdaλ是到达率。对于离线系统,λ≈5\lambda \approx 5λ≈5(200ms平均延迟),而云端系统λ≈0.5\lambda \approx 0.5λ≈0.5(2秒平均延迟)。
7.2 能耗性能分析
长期运行的能耗节省可以计算为:
Esaved=∫0T(Pcloud(t)−Poffline(t))dtE_{saved} = \int_0^T (P_{cloud}(t) - P_{offline}(t)) dtEsaved=∫0T(Pcloud(t)−Poffline(t))dt
假设每天100次语音交互,年度能耗节省约为:
Eannual=365×100×(815−15.5)×10−3=29.2 kWhE_{annual} = 365 \times 100 \times (815 - 15.5) \times 10^{-3} = 29.2 \text{ kWh}Eannual=365×100×(815−15.5)×10−3=29.2 kWh
8. 系统扩展性与鲁棒性
8.1 网络容量分析
Mesh网络的容量受限于中继节点的处理能力。设节点的处理速率为μ\muμ,到达率为λ\lambdaλ,根据排队论,平均等待时间为:
W=1μ−λW = \frac{1}{\mu - \lambda}W=μ−λ1
当λ→μ\lambda \to \muλ→μ时,等待时间趋于无穷,系统饱和。
8.2 冲突解决机制
对于冲突命令,可以采用优先级机制:
Priority=w1×User_Priority+w2×Timestamp+w3×Confidence\text{Priority} = w_1 \times \text{User\_Priority} + w_2 \times \text{Timestamp} + w_3 \times \text{Confidence}Priority=w1×User_Priority+w2×Timestamp+w3×Confidence
其中w1,w2,w3w_1, w_2, w_3w1,w2,w3是权重系数,满足w1+w2+w3=1w_1 + w_2 + w_3 = 1w1+w2+w3=1。
9. 结论
本研究提出的离线语音识别与去中心化物联网集成方案,从根本上解决了现有云端智能家居系统的能耗、延迟和可靠性问题。通过将KWS技术直接集成到家电中,配合mesh网络和CoAP协议,实现了真正的低延迟、高能效语音控制。实验和理论分析表明,系统能耗降低98%,延迟减少75%以上,为未来智能家居的发展提供了新的技术路径。
附录A:KWS神经网络的反向传播推导
设神经网络的前向传播为:
z(l)=W(l)a(l−1)+b(l)z^{(l)} = W^{(l)} a^{(l-1)} + b^{(l)}z(l)=W(l)a(l−1)+b(l)
a(l)=f(z(l))a^{(l)} = f(z^{(l)})a(l)=f(z(l))
其中fff是激活函数,W(l)W^{(l)}W(l)和b(l)b^{(l)}b(l)是第lll层的权重和偏置。
损失函数采用交叉熵:
L=−∑i=1Kyilog(y^i)L = -\sum_{i=1}^{K} y_i \log(\hat{y}_i)L=−i=1∑Kyilog(y^i)
其中KKK是关键词类别数,yiy_iyi是真实标签,y^i\hat{y}_iy^i是预测概率。
反向传播的梯度计算:
∂L∂W(l)=∂L∂z(l)⋅∂z(l)∂W(l)=δ(l)(a(l−1))T\frac{\partial L}{\partial W^{(l)}} = \frac{\partial L}{\partial z^{(l)}} \cdot \frac{\partial z^{(l)}}{\partial W^{(l)}} = \delta^{(l)} (a^{(l-1)})^T∂W(l)∂L=∂z(l)∂L⋅∂W(l)∂z(l)=δ(l)(a(l−1))T
其中误差项δ(l)\delta^{(l)}δ(l)的递归关系为:
δ(l)=(W(l+1))Tδ(l+1)⊙f′(z(l))\delta^{(l)} = (W^{(l+1)})^T \delta^{(l+1)} \odot f'(z^{(l)})δ(l)=(W(l+1))Tδ(l+1)⊙f′(z(l))
对于输出层:
δ(L)=y^−y\delta^{(L)} = \hat{y} - yδ(L)=y^−y
权重更新规则:
W(l)←W(l)−η∂L∂W(l)W^{(l)} \leftarrow W^{(l)} - \eta \frac{\partial L}{\partial W^{(l)}}W(l)←W(l)−η∂W(l)∂L
其中η\etaη是学习率。
附录B:量化误差的理论分析
设原始权重www服从均匀分布U(−a,a)U(-a, a)U(−a,a),量化后的权重为w^\hat{w}w^。
量化噪声n=w^−wn = \hat{w} - wn=w^−w的方差为:
σn2=E[n2]=Δ212\sigma_n^2 = E[n^2] = \frac{\Delta^2}{12}σn2=E[n2]=12Δ2
其中Δ=2a2b−1\Delta = \frac{2a}{2^b - 1}Δ=2b−12a是量化步长。
对于LLL层神经网络,累积量化误差的方差约为:
σtotal2≈L⋅N⋅σn2⋅E[x2]\sigma_{total}^2 \approx L \cdot N \cdot \sigma_n^2 \cdot E[x^2]σtotal2≈L⋅N⋅σn2⋅E[x2]
其中NNN是每层神经元数,E[x2]E[x^2]E[x2]是输入信号的二阶矩。
信噪比(SNR)为:
SNR=10log10(E[y2]E[ntotal2])≈6.02b+1.76−10log10(L⋅N)\text{SNR} = 10\log_{10}\left(\frac{E[y^2]}{E[n_{total}^2]}\right) \approx 6.02b + 1.76 - 10\log_{10}(L \cdot N)SNR=10log10(E[ntotal2]E[y2])≈6.02b+1.76−10log10(L⋅N)
这表明每增加1位量化精度,SNR提升约6dB。
附录C:Mesh网络路由算法的复杂度分析
对于具有nnn个节点、mmm条边的网络,不同路由算法的复杂度:
-
Dijkstra算法:
- 时间复杂度:O((n+m)logn)O((n + m)\log n)O((n+m)logn)(使用斐波那契堆)
- 空间复杂度:O(n)O(n)O(n)
-
Bellman-Ford算法:
- 时间复杂度:O(nm)O(nm)O(nm)
- 空间复杂度:O(n)O(n)O(n)
-
洪泛算法:
- 时间复杂度:O(n⋅d)O(n \cdot d)O(n⋅d),其中ddd是网络直径
- 消息复杂度:O(n2)O(n^2)O(n2)
对于动态网络,链路状态变化的概率模型:
P(link failure)=1−e−λftP(\text{link failure}) = 1 - e^{-\lambda_f t}P(link failure)=1−e−λft
网络分割的概率可以用图的连通性理论计算:
P(partition)=1−∑k=0n−1(−1)k(n−1k)pe(G−k)P(\text{partition}) = 1 - \sum_{k=0}^{n-1} (-1)^k \binom{n-1}{k} p^{e(G-k)}P(partition)=1−k=0∑n−1(−1)k(kn−1)pe(G−k)
其中e(G−k)e(G-k)e(G−k)是移除kkk个节点后的边数。
附录D:功耗优化的拉格朗日方法
系统功耗优化问题可以表述为:
minfi,ViPtotal=∑i=1nPi(fi,Vi)\min_{f_i, V_i} P_{total} = \sum_{i=1}^{n} P_i(f_i, V_i)fi,ViminPtotal=i=1∑nPi(fi,Vi)
约束条件:
- 性能约束:Ti≤TmaxT_i \leq T_{max}Ti≤Tmax
- 电压-频率关系:fi≤k(Vi−Vth)2/Vif_i \leq k(V_i - V_{th})^2/V_ifi≤k(Vi−Vth)2/Vi
其中Pi=CiVi2fiP_i = C_i V_i^2 f_iPi=CiVi2fi是动态功耗,CiC_iCi是电容系数。
构建拉格朗日函数:
L=∑i=1nCiVi2fi+∑i=1nλi(Ti−Tmax)+∑i=1nμi(fi−k(Vi−Vth)2/Vi)\mathcal{L} = \sum_{i=1}^{n} C_i V_i^2 f_i + \sum_{i=1}^{n} \lambda_i(T_i - T_{max}) + \sum_{i=1}^{n} \mu_i(f_i - k(V_i - V_{th})^2/V_i)L=i=1∑nCiVi2fi+i=1∑nλi(Ti−Tmax)+i=1∑nμi(fi−k(Vi−Vth)2/Vi)
求解KKT条件:
∂L∂fi=CiVi2+μi=0\frac{\partial \mathcal{L}}{\partial f_i} = C_i V_i^2 + \mu_i = 0∂fi∂L=CiVi2+μi=0
∂L∂Vi=2CiVifi+μi∂∂Vi(k(Vi−Vth)2Vi)=0\frac{\partial \mathcal{L}}{\partial V_i} = 2C_i V_i f_i + \mu_i \frac{\partial}{\partial V_i}\left(\frac{k(V_i - V_{th})^2}{V_i}\right) = 0∂Vi∂L=2CiVifi+μi∂Vi∂(Vik(Vi−Vth)2)=0
最优解满足:
Vi∗=3Vth2V_i^* = \frac{3V_{th}}{2}Vi∗=23Vth
fi∗=kVth24f_i^* = \frac{k V_{th}^2}{4}fi∗=4kVth2
这给出了最优的电压-频率工作点,可使功耗最小化。

葡萄城是专业的软件开发技术和低代码平台提供商,聚焦软件开发技术,以“赋能开发者”为使命,致力于通过表格控件、低代码和BI等各类软件开发工具和服务
更多推荐


 38
38 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)